
Autonomous Sailboats

Two sail powered autonomous boats will be crossing the Atlantic Ocean.
A wind-powered autonomous boat has several distinct disadvantages over a solar-electric vessel. The power cannot simply be “turned off”, so the boat is always in motion, making it difficult to stay in position for gathering oceanic data at specific waypoints. Additionally, maneuvering and speed control is much less precise, making autonomous sailboats unsuitable for congested waterways such as harbors. The greatest problem, however, is sail power cannot be stored, so when the wind stops (and calms can be frequent depending on location) forward motion ceases. Combined with strong currents, a lack of wind can quickly cause problems.
Despite the drawbacks of sail, it is still a suitable form of propulsion for an autonomous boat. For applications where precise control is not required, and reliable prevailing winds expected, it is an inexpensive and dependable way to propel a vessel. This is why we have chosen to
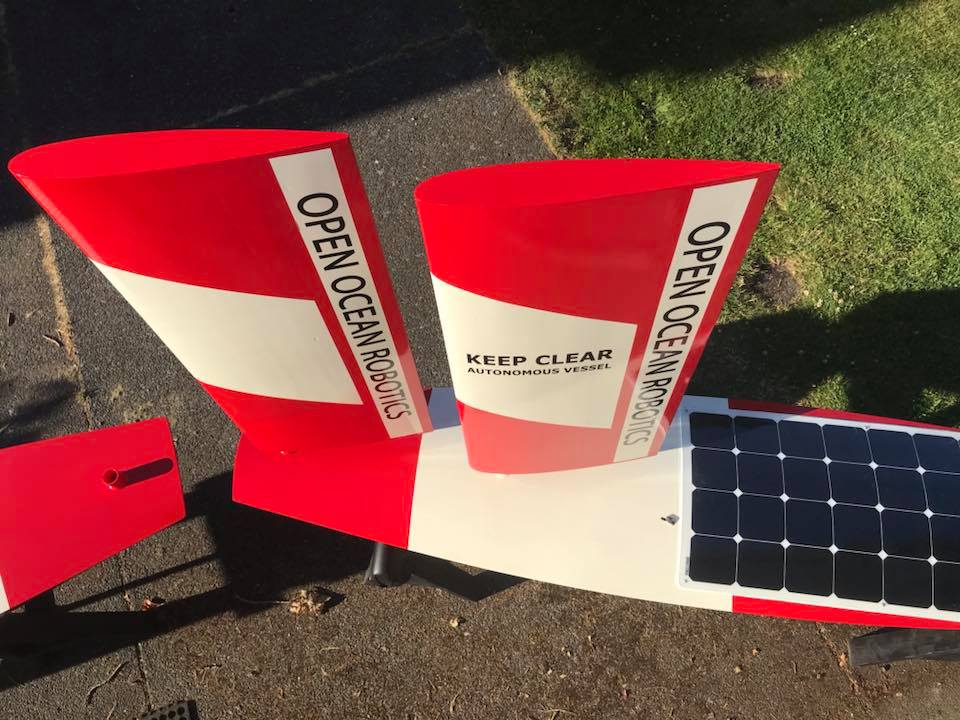
Foil-shaped rigid sails offer much greater longevity than traditional sails.
develop two autonomous sailboats for our Atlantic record attempt. The route the boats will be following will be making use of the reliable west to east winds, and only rudimentary directional control will be required to follow waypoints.
The two primary attributes we designed our autonomous sailboats around are seaworthiness and reliability. Our secondary consideration was creating an overall design that was as fast as possible, without any compromise to reliability. The two vessels we created are almost identical apart from the sails, one using rigid wing sails, and the other utilizing conventional cloth. Overall, the wing sails are preferable, since they do not fray and flog in heavy winds, offering indefinite longevity. We opted to have one of the boats using cloth sails, so we can directly compare the pros and cons of the two systems with future testing.
A lead bulb is affixed to the bottom of the keel to make the boat self righting. The placement of the bulb, combined with the angle of the keel allows

Primary design attributes are reliability and seaworthiness.
seaweed and other debris to be shed with forward motion.
The overall structure of the boat, the masts, sails, keels, etc have been engineered to withstand extreme hurricanes. Smaller to mid-sized breaking waves will wash over the decks, and larger breaking waves will cause the boat to tumble end over end, always self righting and resisting damage.
The rudder is controlled with a Swiss actuator, and the navigation system is comprised of a computer connected to various sensors including an accelerometer, GPS, flux compass, etc. The vessels can be controlled via remote control (using computer telemetry or standard rf), or they can voyage autonomously with the onboard computer guiding the vessel.
At this point the two autonomous sailboats have been built and are commencing ocean trials. Performance, so far, is exceeding expectations.
Please check back to find out more or subscribe to our newsletter for an email update.