Things have been busy these days as we race against the clock to complete our autonomous boat, all while juggling our keynote speaking and boat businesses. The electronics systems have all been developed and have been installed in the prototype for further testing. The hulls for the actual boat have been constructed, and the various systems are being installed as they are tested. We have radically redesigned the overall drive system, and have opted to use an inboard motor rather than an external pod design. This decision was made after consultations with Grin Technologies, where it was determined the most efficient motors for our application were too large to fit in a hydrodynamically shaped pod.
Things have been busy these days as we race against the clock to complete our autonomous boat, all while juggling our keynote speaking and boat businesses. The electronics systems have all been developed and have been installed in the prototype for further testing. The hulls for the actual boat have been constructed, and the various systems are being installed as they are tested. We have radically redesigned the overall drive system, and have opted to use an inboard motor rather than an external pod design. This decision was made after consultations with Grin Technologies, where it was determined the most efficient motors for our application were too large to fit in a hydrodynamically shaped pod.
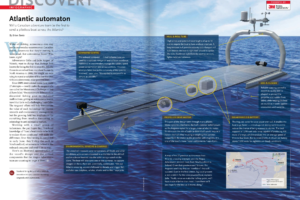
In other exciting news, UK FlowTechnik has provided us with a German-made top quality magnetic coupler. This will allow the torque from the motor to be conveyed through the boat hull to the propeller without requiring a hole in the boat. The benefits of this compared to a conventional stuffing box is increased efficiency (almost zero friction compared to a regular seal), and indefinite longevity. Typical sealing systems without maintenance will fail in 100-1000 hours. Our magnetic coupling will have zero wear after 100,000 hours. The only wear points in the drive system are the radial ceramic bearings supporting the drive shaft, which will last a long time.
A few weeks ago, we tested our overall navigation system with good success. We launched the prototype in Thetis Lake, and had it follow a course of waypoints around the lake. A concerned passerby called the police, as they assumed a 24’ boat with nobody onboard meant man overboard. The boat has three means of being controlled; we can control it through our computer through 915 mzh telemetry, we can control it with a conventional remote control transceiver, and, of course, it can operate autonomously controlling itself. We can switch between autonomous travel and remote control with the flip of a switch. For deep ocean voyaging, we can use telemetry that communicates via satellite to change the boat’s course, however, we won’t do this for the Atlantic crossing, otherwise the voyage won’t be considered fully autonomous.
The next stages in development will be testing the prototype in stormy/rough conditions, and to do any fine tuning required from tests. Our home city of Victoria is ideal for rough-water testing, as the Juan de Fuca Strait regularly has rough open-ocean-like conditions.
Watch the video below for a description of the autonomous boat systems and see it being tested on the water.